ORB-SLAM
Summary
- 🧩 다양한 환경에서 실시간으로 작동하는 단안 SLAM 시스템
- 🔑 모든 SLAM 작업에 동일한 ORB 특징 사용 → 효율성과 신뢰성 향상
- 📊 27 개 시퀀스 평가에서 타 기술 대비 뛰어난 성능 입증
Related Notes
- SLAM 기초: RP25_L18_SLAM_Introduction - SLAM 개념, 확률 모델, 분류 체계
- 특징점 알고리즘: FAST | BRIEF | SIFT | SURF
- Visual SLAM: RP25_L25_Visual_SLAM
1. ORB-SLAM 개요
ORB-SLAM 은 카메라만으로 SLAM 을 수행하는 시스템이다. 레이저 센서 없이 실시간 동작한다.
1.1 선행 연구의 한계
- PTAM 의 단점:
- Loop Closing 부족
- 시각 차단 조절 능력 부족
- 사람의 개입 필요성
1.2 ORB-SLAM 의 기여
- 모든 task(tracking, mapping, relocalization, loop closing) 에 같은 ORB features 사용
- 효율, 간편, 신뢰성 향상
- GPU 없이 Real-time 수행
- Covisibility graph1 로 local area 에 집중 → 큰 환경에서도 효율적
- Essential Graph(pose graph) 최적화로 실시간 loop closing
- 실시간 relocalization → tracking 실패 시 회복 가능
- 초기화 절차 자동화
- Keyframe culling → Map 크기 제어, Lifelong 운영 가능
2. ORB-SLAM 시스템 구조
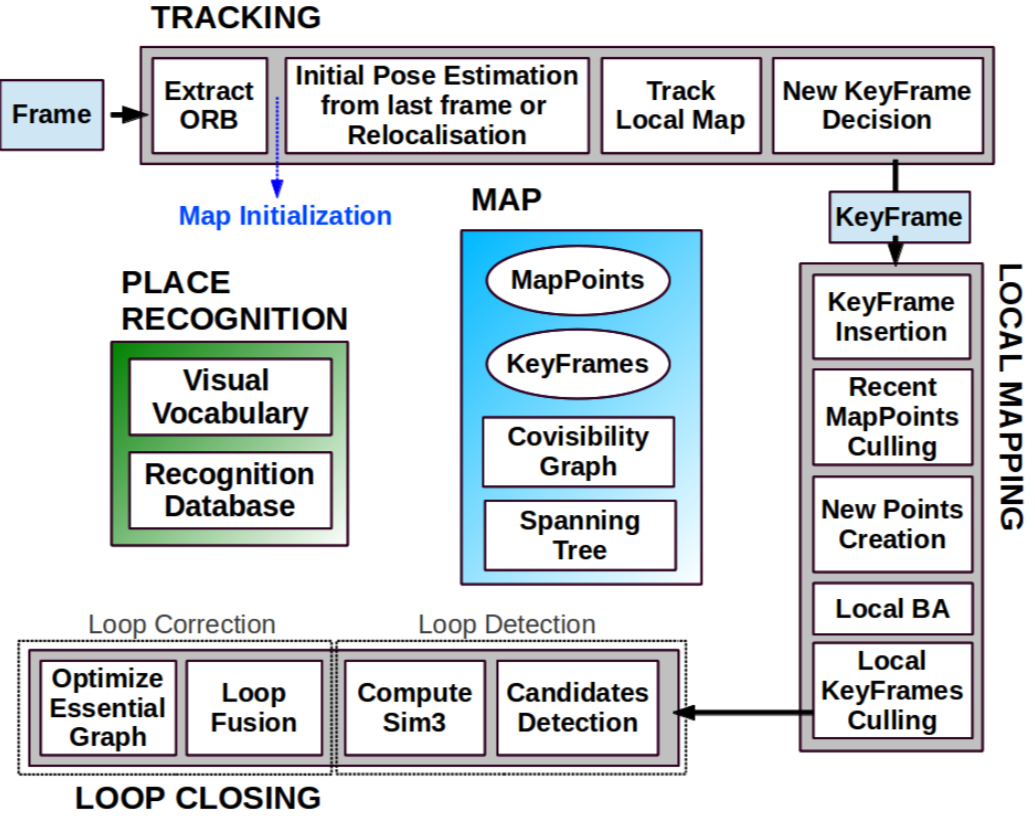
ORB-SLAM 은 3 개의 병렬 스레드로 구성된다:
2.1 Tracking (추적 스레드)
- 역할: 실시간 카메라 위치 파악
- 속도: 매우 빠름 (30fps)
- 처리 과정:
- ORB 특징점 추출
- 이전 프레임/지도와 매칭
- PnP + RANSAC 으로 포즈 추정
- 키프레임 선정 및 전달
2.2 Local Mapping (지도 제작 스레드)
- 역할: 지도 추가 및 정교화
- 속도: 중간 (키프레임마다)
- 처리 과정:
- 삼각측량으로 새 맵포인트 생성
- Local Bundle Adjustment
- 중복 키프레임 제거 (Culling)
2.3 Loop Closing (루프 폐쇄 스레드)
- 역할: 재방문 감지 및 오차 수정
- 속도: 느림 (가끔씩)
- 처리 과정:
- DBoW2 로 장소 재인식
- 기하학적 검증
- Pose Graph Optimization
- Full Bundle Adjustment
3. ORB Feature (Oriented FAST and Rotated BRIEF)
ORB 란?
ORB = Oriented FAST + Rotated BRIEF
3.1 ORB 특징점 추출 파이프라인
| 단계 | 알고리즘 | 하는 일 |
|---|---|---|
| 특징점 탐지 | FAST | 코너 위치 |
| 방향 계산 | Intensity Centroid | 각 특징점의 방향 |
| 기술자 생성 | Rotated BRIEF | 방향 |
3.2 Oriented FAST - 방향이 있는 코너 검출
FAST 는 빠르지만 회전 불변성이 없다 (방향 정보 없음). ORB 는 Intensity Centroid (밝기 무게중심) 방법으로 방향을 추가한다.
무게중심이란?
물리적 직관
정사각형 종이의 밀도가 균일하면 무게중심은 정확히 가운데다. 하지만 오른쪽에 납을 붙이면 무게중심이 오른쪽으로 이동한다.
이미지도 동일하다. 픽셀의 **밝기 (intensity)**를 질량으로 생각하면, 밝은 쪽으로 무게중심이 당겨진다.
이미지 모멘트 (Moment) 표기법:
→ 전체 밝기의 합 (= 전체 질량) → x 방향 1 차 모멘트 → y 방향 1 차 모멘트
무게중심 좌표:
왜 무게중심 방향을 쓰는가?
특징점 주변 패치의 밝기 분포는 그 특징점의 고유한 특성이다. 예를 들어 ‘L’ 모양 코너에서 한쪽은 밝고 (벽면) 다른 쪽은 어둡다 (그림자). 이 밝기 분포 때문에 무게중심이 특정 방향으로 치우치고, 이것이 특징점의 방향이 된다.
-1765364279793.jpeg)
회전 불변성 확보: 카메라가 30 도 회전하면 패치도 30 도 회전 → 무게중심 방향도 30 도 회전. 따라서 이 방향을 기준으로 기술자를 만들면 회전해도 같은 기술자가 나온다.
방향 계산
특징점 위치
(
3.3 Rotated BRIEF - 회전 불변 기술자
BRIEF 는 빠르지만 회전에 약하다 (픽셀 쌍 위치가 고정). ORB 는 특징점 방향
미리 정해진 256 개 픽셀 쌍 패턴을
3.4 이미지 피라미드 - 스케일 불변성
원본 이미지를 점점 축소한 8 단계 피라미드 생성:
Level 0: 원본 (640×480)
Level 1: 0.83배 (531×398)
...
Level 7: 0.28배 (179×134)
3.5 특징점 알고리즘 비교
4. Tracking 상세
4.1 ORB 특징점 추출
매 프레임마다:
- 8 단계 이미지 피라미드 생성
- 각 레벨에서 FAST 코너 탐지
- Harris corner response 로 선별
- 방향 계산 (Intensity Centroid)
- Rotated BRIEF 기술자 생성
프레임당 1000~2000 개 특징점 추출
4.2 특징점 매칭
- 해밍 거리가 가장 작은 것 = 매칭
- 최고/2 등 매칭 차이가 작으면 버림 (Ratio test)
4.3 카메라 포즈 추정 (PnP)
2D-3D 대응 관계로 카메라 위치/방향 찾기:
: 카메라 내부 파라미터 (알고 있음) , : 회전/이동 (구해야 함)
4.4 RANSAC 으로 이상치 제거
- 랜덤하게 4 개 매칭 선택
- 포즈 계산 → 모든 매칭 검증
- 반복 후 가장 많이 맞는 포즈 선택
4.5 키프레임 선정 기준
- 이전 키프레임에서 충분히 이동?
- 새로운 영역이 많이 보이는가?
- 특징점이 충분한가?
5. Local Mapping 상세
5.1 삼각측량 (Triangulation)
두 카메라 광선이 만나는 지점 = 3D 점 위치
5.2 Bundle Adjustment
카메라들과 3D 점들을 동시에 조정하여 재투영 오차 최소화:
Levenberg-Marquardt 알고리즘으로 최적화
5.3 키프레임 Culling
맵포인트의 90% 이상이 다른 키프레임 3 개 이상에서 보이면 → 중복이므로 제거
6. Loop Closing 상세
6.1 드리프트 문제
오차 누적: 100m 이동 시 ~1m 오차
6.2 DBoW2 로 장소 재인식
Bag of Words (BoW) 방식:
- ORB 기술자들을 그룹화 → Visual Vocabulary
- 이미지를 BoW 벡터로 표현
- 유사한 BoW 벡터 = 유사한 장소
6.3 Pose Graph Optimization
7. 핵심 요약
ORB 특징점
- Oriented FAST: 코너 탐지 + 방향 (intensity centroid)
- Rotated BRIEF: 256-bit 이진 기술자, 방향 보정됨
- 8-scale 피라미드로 스케일 불변성
3 개 스레드
- Tracking: ORB 추출 → 매칭 → PnP+RANSAC
- Local Mapping: 삼각측량 + Local BA + Culling
- Loop Closing: BoW 장소 인식 → Pose Graph Optimization
Reference
Original
- ORB-SLAM: A Versatile and Accurate Monocular SLAM System
- ORB: an efficient alternative to SIFT or SURF
Additional
Related Work
- Bags of Words: Bags of Binary Words for Fast Place Recognition
- LSD-SLAM: Large-Scale Direct Monocular SLAM
Footnotes
-
Map point 와 keyframes 를 연결한 그래프. 노드는 keyframes 를 나타내고 엣지는 두 keyframes 이 같은 point 를 관측하고 있음을 나타냄. ↩